







Gear design and development is a complicated art. Ignore or miscalculate the operating and environmental effects and the likely result is a gear set that doesn’t mesh properly, which will cause excessive noise, gear failure, or both. This is especially true for molded plastic gear design, where the initial engineering effort is greater than that required with metals to cope with greater changes in material properties and dimensions across the entire range of operating conditions. This specialized, high technology area requires considerable expertise to develop, design, and produce precision plastic gear transmission components. The importance of designing plastic gears so the dimensional requirements match with the material and process capabilities cannot be overemphasized. Proper plastic gear design, with the primary focus on getting the geometry of the gear pair right, requires an in-depth understanding of the broader relationship of materials, layout, shafting, bearings, and housings.
Some companies recognize the specialized nature of this activity and have dedicated plastic gear specialists. They understand that plastic gear design requires extensive analysis under all possible operating conditions that involve many variables to develop the confidence required to commit the expense of the prototype fabrication and development phase. Computer analysis tools help these specialized designers analyze the various dimensional, temperature and load conditions.

Defining Transmission Requirements
At the core of any successful plastic gear design and development process is the development team, a cooperative effort headed by a project engineer and an assembled group made up of a gear engineer, plastics engineer, resin supplier, molder, tool builder, manufacturing engineer, quality control engineer, and purchasing. The role of this team is to ensure that all aspects of plastic gear design, manufacture, and operation are not overlooked throughout the development process.
One common error of plastic gear designers is starting with an insufficient understanding of the plastic transmission requirements. Another role of this development team is to clearly understand and gather critical data for these requirements (see Table 1). These defined operating parameters will lead the team to overall system considerations, from weight and size requirements, gear arrangements, and shaft, bearing, and housing requirements. Decisions on the specific gears will evolve from these concepts, especially preliminary decisions on materials, sizes, and geometries that are based on simple load analysis, tooling, and processing considerations.
The initial materials are selected based on how well the plastics match the application’s operating environment, meet the appropriate property mix, and interact with other components. To get a product to market rapidly, a manufacturer may rush the conceptual designs and select a specific design prematurely. This can lead to poor performance and actually extend the development cycle by forcing design readjustments to meet system requirements later on.
As the conceptual design stage draws to a close the team evaluates each gear and associated part’s production tolerances, their contribution to the overall system, and alternatives to improve the system and reduce costs. These concepts determine potential materials and fabrication processes. These designs then undergo detailed analysis, using computer analytical models for tooth geometry evaluation and load analysis. This includes determining the effective operating center distance range by factoring in all possible tolerances and environmental influences on part dimensions, as well as evaluating each gear mesh at extreme operating conditions: tight mesh, maximum material; open mesh, minimum material; and everything in between, including the combination of worst load sharing condition and minimal material properties.

Mesh Conditions
With the transmission concept’s preliminary sizing, tolerance selection, and material selection established, the real gear design effort begins. Successful transmission design with plastic gears requires an appreciation of the tight and open mesh—maximum/minimum engagement—conditions for all components (Table 2).
In the tight mesh condition, the gear set is operating at its minimum center distance while the gear dimensions are at the maximum material condition. Likewise, in the open mesh condition the gear set is operating at its maximum center distance, while the gear dimensions are at the minimum material condition. To find the effective operating center distance range, first find the assembled center distance range at ambient temperature. Then, determine the dimensional effects of the environmental conditions—temperature and moisture expansion and contraction. Then combine these data to determine the overall maximum and minimum effective operating center distance range of the gear set.
Assembled Center Distance
The assembled maximum and minimum center distance calculation includes all factors that influence the radial operating position of the “ideal” gear profile. The assembled center distance includes the maximum and minimum housing or mounting center distance, the runout, and maximum and minimum radial play of the bearing systems and the total composite tolerances of the mating gears (Table 3). Obtain the total composite tolerance (TCT) (Table 8) from the quality class of the gear; however, it may be assigned separately. Note that by including the TCT in the assembled center distance calculation, the operating profile of the gear may be treated as “ideal” with no radial variation in subsequent calculations. Equations 1-4 are for maximum and minimum assembled center distance for external (parallel or crossed-axis) and internal gear pairs.
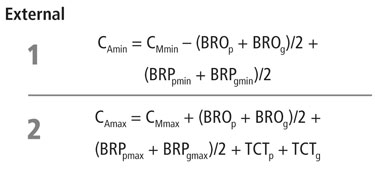
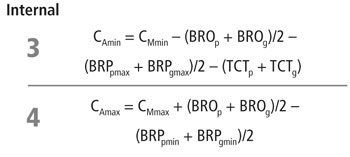
In the equations for assembled center distance, CA, subscripts min and max represent minimum and maximum throughout and p and g represent the pinion and gear. The M subscript represents the gear housing or mounting. Start with both the corresponding maximum or minimum mounting or housing center distance. Assume the loads on the gears will push them apart along the line of centers to the fullest extent possible. This is the worst case. For discussion purposes, consider the external assembled center distance equations. Half of the total indicator runout of the bearings (BRO) is subtracted for the minimum assembled center distance and added for the maximum assembled center distance. In addition, half of the total minimum bearing radial play (BRP) is added to obtain the minimum assembled center distance and half of the total maximum radial play is added to obtain the maximum assembled center distance.

Finally, the total composite tolerances of the pinion and gear are added only to the maximum assembled center distance equation. It should be noted that these assembled center distance equations were written assuming the methods used in setting the maximum and minimum test radii and measuring the total composite variation are in accordance with AGMA 2002-B88, Tooth Thickness Specifications and Measurement.
Note that for an external gear set, the minimum assembled center distance is the position of maximum tooth engagement and the maximum assembled center distance is the position of minimum tooth engagement. For an internal gear set, the opposite is true.
Effective Operating Center Distance
Now determine the range of effective operating center distances by considering the influences of the operating environment—temperature, moisture and chemical exposure (Table 4). The housing or mounting, pinion and gear operating temperatures (T) will differ from the assembly temperature (Ta). Therefore, the operating temperature change (∆T) of each component is given by:
∆TM = TM – Ta
∆Tp = Tp – Ta
∆Tg = Tg – Ta

Likewise, the operating moisture levels (RH) will differ from that during assembly (RHa). Therefore, the operating humidity change (∆RH) is given by: (∆RH) = RH – RHa.
The housing, pinion, and gear materials’ coefficients of linear thermal expansion (a) are needed as well as their moisture exposure coefficients of expansion (k). With the nominal operating pitch diameters of the gear and pinion (dg and dp) the change in operating center distance (∆C) is shown in equations 5 and 6.
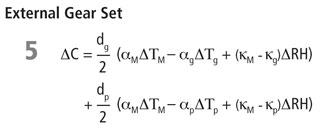
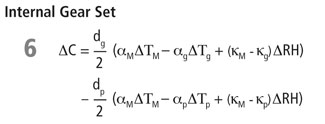
Now add these equations for each of the four combinations of temperature and moisture extremes to the minimum and maximum assembled center distances to obtain the minimum and maximum effective operating center distances (CO) at each environmental combination (see equation 7).
In addition, it may be necessary to include k value effects in operating center distance changes from swelling or shrinkage caused by exposure to chemicals or lubricants.
From the resulting four values of COmin and COmax, there will be one absolute minimum and one absolute maximum that cover the full range of effective operating center distances over which the gear set must operate and which must be used to perform the gear geometry and load analyses.
Design at Tight Mesh
Now, design the gear set at the tight mesh condition (Table 5). Tight Mesh conditions are characterized by the gears’ maximum outside and root diameters, maximum tooth thicknesses, and minimum tooth tip radii. The tight mesh condition also operates at the absolute minimum effective operating center distance previously determined. Under such conditions, the designer needs to ensure the gear set has adequate root clearances and backlash to prevent interference and binding.

The designer may modify the gear tooth geometry to increase the profile contact ratio or reduce specific sliding of the teeth. Depending on the effective operating center distance range, profile contact ratios as high as 1.5 may be necessary (for spur gears) in the tight mesh condition to ensure sufficient contact ratio in the open mesh condition. For dry-running plastic gears, further reduce the specific sliding as low as possible since it is directly related to tooth wear. This will also improve the efficiency as the product of the sliding velocity, contact force, and coefficient of friction is the power loss in the mesh.
In addition to geometry considerations, load analysis of the mesh may indicate additional modifications are required. One gear, usually the pinion, may be significantly weaker than the other due to its greater number of tooth bending cycles. Modification, such as equalizing the tooth thicknesses, may be required to balance the tooth strengths of the gears. Load analysis can also determine whether the mesh and tooth tip deflections are excessive.
If the deflection of the mesh along the line of action is high enough, the driving pinion tooth will be early and the driven gear tooth will be late in arriving at the first point of contact. This will produce an impact condition that causes a shock load and subsequent increased stress, wear, and noise. Tip relief added to the driven gear teeth will allow the load to be picked up more gradually and will greatly reduce the impact on the system. Likewise, tip relief added to the pinion teeth will allow the load to be gradually released rather than suddenly dropped at the end of the line of action. This will also reduce the amount of sliding off the line of action and reduce the wear on the teeth.

Examine Open Mesh
After the gear set is designed at tight mesh, examine the open mesh condition (Table 6). The open mesh condition considers gears’ minimum outside and root diameters, minimum tooth thicknesses, and maximum tooth tip radii. The open mesh condition operates at the absolute maximum effective operating center distance. Here, the most important concern is the profile contact ratio, especially for spur gears. If the profile contact ratio of a spur gear set is below 1.0 it will result in speed variations of the output gear, impact loading, excessive noise, wear, and potential failure. If the profile contact ratio is below 1.0, consider a redesign of the gear set. For spur gears this is a must. A change may be necessary in the pitch (or module) or tooth proportions. Also, it may be necessary to renegotiate tolerances to reduce the assembled center distance range. Changing gear or housing materials to more closely match thermal expansion rates will further reduce the change in contact ratio between tight and open mesh conditions. Finally, once the contact ratio is acceptable, perform a load analysis in the open mesh condition to verify acceptable tooth stresses and deflection under this condition.
Examine Worst Load Condition
The previous tight and open mesh discussion examines the extreme mesh conditions in terms of the geometry and tolerances. Unfortunately, there are other operating conditions that may be worse for the gear set (Table 7).
Tight mesh, maximum load sharing conditions with plastic gears are usually encountered in hot and wet environments when material properties are lowest. Open mesh, minimum load sharing conditions usually occur when gear sets are cold and dry when material properties are greatest. However, the worst load conditions may occur with an open mesh during hot and wet conditions. Transient startup conditions can have hot gears in a cold housing. The gear development team must establish the worst load conditions and iterate on design alternatives to achieve a working solution.

Complete Iterative Process
While plastic gears give the engineer enormous flexibility and injection molded gears can achieve high quality standards at relatively lower cost, they are more complicated to design and develop than those in metal. Clearly, the plastic gear transmission design process is highly iterative. However, if all of the conditions are carefully examined, the gear design team can move forward with a high degree of confidence. With the help of computer aided design tools, this design process is greatly streamlined. Remember, optimizing a design during the design phase is much more cost effective than repeatedly cutting tools and testing parts.
Note: To the best of our knowledge, the information contained in this article is accurate. However, we do not assume any liability whatsoever for the accuracy and completeness of such information. Any determination of the suitability of polymers for any use contemplated by the users and the manner of such use is the sole responsibility of the user.




























