








This paper explains the differences and the effects of zero-helix-angle and non-zero-helix-angle gears in planetary gear systems. As a conclusion, it points out that the belief “helical is better” is not sustainable. For lower noise and quieter run, helical gears have the advantage. If it comes to loadability, smaller size, and higher torque density, as well as longer life, the zero helix angle system has the clear advantage.
Zero and Non-zero Helix Angle Gears
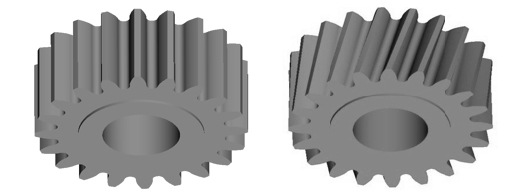
As refresher, let’s start with the definition. Helix angle is the angle between the helix of the tooth flank in reference centerline (axis of rotation) of the gear (not to mix it up with the lead angle which is the complement helix angle measured between the perpendicular to the axis and the tooth flan helix). Zero-helix-angle gears are also called straight or spur gears; non-zero-helix angle gears are called mostly “helical gears.”
The main reason for using helical gears is the increased number of teeth in contact. There is one fundamental requirement for any gearing, helical or not: for a smooth run/torque transmission, before one pair of gear teeth leaves the mesh (leaves the contact), another pair of teeth must enter into contact. The average number of teeth in contact is called the contact or overlap ratio. With an increased contact ratio the gears are engaging smoother, the fluctuation of the gear mesh stiffness is lower, and the mesh can carry somewhat higher loads.
A few decades ago, making helical gears was more complex and more expensive. This changed with the modern gear cutting CNC machinery. Today, only slightly more effort is required make gears with a certain helix angle, mainly due to the more complex metrology and quality control—not because of the cutting process.
Helical gears create axial forces in the gear-mesh, which must be supported in the bearings and housing of the gearbox. There is more “sliding” in the tooth contact. Commonly the helix angle is selected between 15 to 30 degrees. With increasing helix angle the axial forces as well as the sliding in the mesh increases. Zero-helix-angle gears do not create axial forces and the sliding practically zero.
Still, it sounds like a strong case for the helical, over the zero-helix angle gears, right? Why should any gearbox utilize spur gears? Let’s examine the influence of the helix angle in the two basic gear systems: fixed axis and moving axis systems.
Definition of Fixed Axis and Moving Axis Gear System
Fixed axis gear systems: The location of central-lines (axis of rotation) of the gears is fixed. The mutual location of the axis is not changing. The gears are rotating only around their axis. A wide range of traditional industrial gearboxes belongs to this category.
Moving axis gear systems: Some axis of the gears can “move” (rotate) in relation to the other axis. The location of some gear axis is not fixed. Planetary (epicyclical) gears, which are in the last decades getting used increasingly in a number of applications, belong in this category.
In fixed axis gearboxes, the added axial load component and the increased sliding resulting from the non-zero helix angle is only a small inconvenience. Support of the axial gear mesh forces can be accomplished easily by appropriate bearing selection, using larger size bearings, or, in extreme cases, using bearings that can carry high axial loads such as angular contact or tapered roller bearings. (Note that the bearings in the fixed axis system have only one function, namely to support the rotating gear shafts. The bearings have only a “passive supporting function.”)
Unfortunately, the axial forces from the helical gears in planetary systems have more serious consequences. Let’s short review the function/kinematic of a simple planetary system.
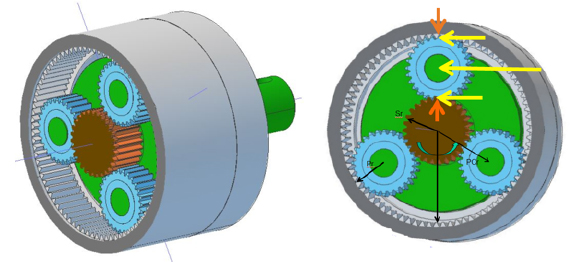
The high torque output is connected to a so-called “planet carrier”, which has pins (axis) to “carry” the planet gears. Planet gears are in engagement with the sun gear (normally the high-rpm, low-torque input side), and on the other side, 180 degrees opposite, with the normally stationary ring-gear. Figure 3 shows the planet gear with the gear mesh forces. For simplicity, only the tangential and axial component of the gear-mesh forces are shown.
The torque from the input sun-gear is split into multiple gear meshes depending upon the number of plant gears used. The planets are rolling up “on” the sun-gear, and the same time in the ring-gear. The resulting “boosted torque rotational motion” is transferred from the planets via the planet carrier pins to the actual output –shaft, -disc or flange. The forces are transferred from the planets to the carrier pin through the planet bearings.
(Note, contrary to the fixed axis gear, the bearings between the planet gear and carrier pin are fully engaged in the torque transfer. These bearings have an “active” torque transferring / “torque generating” function.)
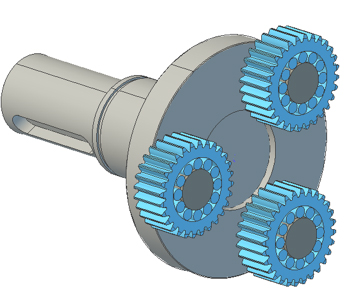
And here is the rub; high loads—along with limited space for large robust bearings between the planet carrier pin and planet gear—generally mandate the usage of compact needle roller bearings. Figure 4 shows a typical simple planetary gear output shaft with planet gears running on “needle rollers.”
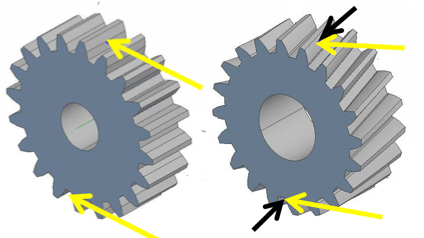
Needle roller bearings are well suited for high radial loads evenly distributed along the length of the needle. Axial loads should be avoided. As we can see in Figure 4, zero-helix angle gears create no axial forces. On the other hand, helical gears create axial forces in the gear mesh on the two opposite sides of the gear. The direction in the axial force in the sun/planet mesh is opposite of the force in the planet ring gear mesh, hence the planet is subjected to a significant tilting, the magnitude of which is axial force times gear pitch diameter.
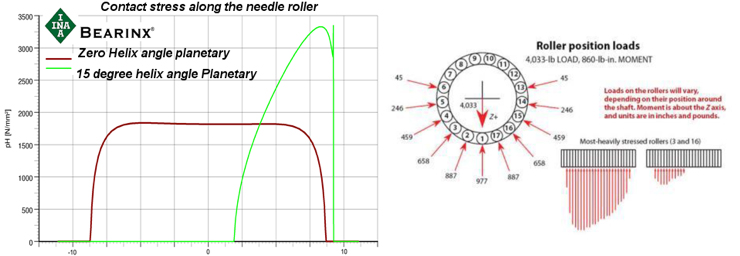
This creates a strongly “skewed,” uneven load distribution along the needle rollers, drastically lowering the needle-bearing load carrying capability and bearing life. Figure 5 shows two studies of the load distribution on the needle rollers in planetary gears. One was carried out using a high level specialized program from the bearing manufacturer INA/FAG. The red line in the graph represents the load distribution along the needle roller using a zero-helix angle gear the green line is for a 15-degree helix angle gear.
Similar calculations were presented recently by Kelvin M. Smith, senior application engineer at Torrington(1). The author selected the complex example of calculating load distribution in the needle bearing of a helical planter gear to demonstrate the power of the Torrington bearing analysis program. The results are graphically presented a different way than in the INA program, but it clearly shows the very unfavorable load distribution in the needle bearing.
The practical implication of this uneven load distribution is that the loadability and life of the helical planetary gearbox is reduced drastically in comparison to same size zero helix angle solution. As mentioned previously, in planet gears the needle bearings are directly involved in the torque transfer, torque generation. Therefore, the needle bearing life and loadability has a strong limiting influence upon the torque rating of the planetary gearbox.
Conclusions
Disadvantages of Helical Planetary Gears:
• Lower torque-carrying capability and shorter life than a same size zero-helix angle planetary
• To satisfy a certain torque requirement, a larger unit is required than in the case of zero helix angle planetary. The torque density and Torque/$ ratio is less favorable than that of a zero helix angle planetary because the sliding. Because of the sliding, the efficiency is somewhat lower.
Advantages of Helical Planetary Gears:
• Smoother, less-noisy run
• Less vibration due to the smoother entry of the teeth into the gear-mesh
• More even mesh stiffness.
What to Do?
The question is not “helical or not helical,” but in which applications should each be used. A “one-size-fits-all” approach is seldom the optimal solution.
Recommended Approach
In noise-critical applications, such as medical equipment, diagnostic machines, and printing machines, the helical planter might be the better choice. However, remember you will have to select a larger unit for a given torque/desired life.
If noise is not a primary application concern, you are far better off with a zero helix planetary, which has higher loadability and longer life in a more compact package. Very few manufacturers offer both options.
1 The graphs in Fig 5b are from the article from Kelvin M. Smith, senior application engineer at Torrington. The complete article can be found at: http://machinedesign.com/bearings/analyzing-essentials-bearing-performance.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}